Dispersion of Flexural Waves
Daniel A. Russell, GMI Engineering & Management Institute
 |
A simple experiment can be performed to demonstrate the dispersive nature of flexural waves
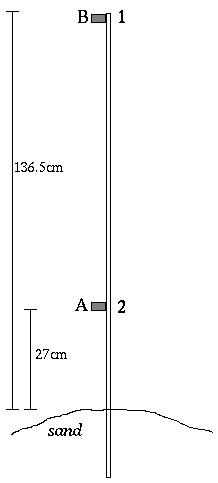
- An aluminum bar of cross-section 1/4 x1/2 inch and length 6 ft is vertically inserted in sand so that 4.48 ft (136.5 cm) is allowed to freely vibrate in a horizontal direction.
- The sand acts as a non-reflective boundary so that any flexural waves incident upon the sand will be completely absorbed.
- PCB accelerometers (1 gram) are attached at positions A and B
- Aluminum bar is excited with an impulse, using PCB hammer with plastic tip, at points
1 and 2
- The time signals measured by the accelerometers are displayed on an oscilloscope (one that can store a trace)
|
Discussion of Time Signals
The equation of motion for flexural (bending) waves in a beam is
 where
where  is the speed of a quasi-longitudinal wave (E is Young's modulus and ρ is the mass density). This equation of motion is a fourth-order differential equation such that the solutions are not of the form y(x,t) = f(x-ct) + g(x+ct). In addition,
the flexural wave speed is dispersive
is the speed of a quasi-longitudinal wave (E is Young's modulus and ρ is the mass density). This equation of motion is a fourth-order differential equation such that the solutions are not of the form y(x,t) = f(x-ct) + g(x+ct). In addition,
the flexural wave speed is dispersive
 as evidenced by the fact that the wave speed is proportional to the square root of frequency. Thus, higher frequency flexural waves will travel faster than lower frequency flexural waves.
as evidenced by the fact that the wave speed is proportional to the square root of frequency. Thus, higher frequency flexural waves will travel faster than lower frequency flexural waves.
A force pulse contains many (almost infinite) frequency components
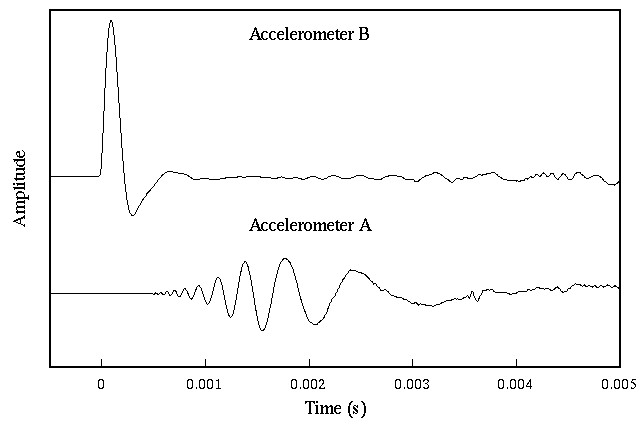
Hammer impact at Point 1
- Force pulse is very clean at location B
- Pulse disperses by the time it reaches location A --- higher frequency waves travel faster and arrive first --- lower frequency waves travel slower and arrive later
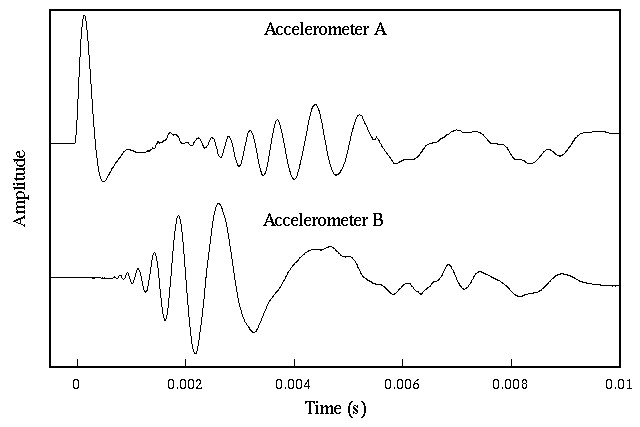
Hammer impact at Point 2
- Initial force pulse is very clean at location A
- Pulse disperses by the time it reaches location B --- higher frequency waves travel faster and arrive first --- lower frequency waves travel slower and arrive later
- Flexural waves reflect from free end of beam and travel back down to location A --- dispersion is even more evident in reflected signal
Back to the Vibration and Waves Demos Page